atorias presenten las mismas propiedades estadísticas que aquellos.
Nótese además, que otra muestra recolectada del mismo sistema
físico no seguirá necesariamente la misma pauta de la primera
muestra, pero sí es de esperar que presente las mismas propiedades
estadísticas.
Así pues, el objetivo no es conseguir generar una secuencia de
datos idéntica a la obtenida en una muestra del sistema a modelar,
sino poder generar datos con las mismas propiedades estadísticas
que los datos de la muestra.
Podemos utilizar funciones de distribución de probabilidad para
describir, a ciertos niveles de abstracción, el comportamiento gene-
ral aproximado de los sistemas en estudio. Un modelo es una abs-
tracción del sistema de interés. Esto implica que sólo se modela lo
que ocurre y no necesariamente la mecánica de cómo suceden los
eventos. En este contexto las funciones de distribución de probabi-
lidad resultan muy útiles para especificar un conocimiento abstrac-
to y distribuido de los sistemas a simular. Construir un modelo que
30 CÓMO MEJORAR LA LOGÍSTICA DE SU EMPRESA MEDIANTE LA SIMULACIÓN
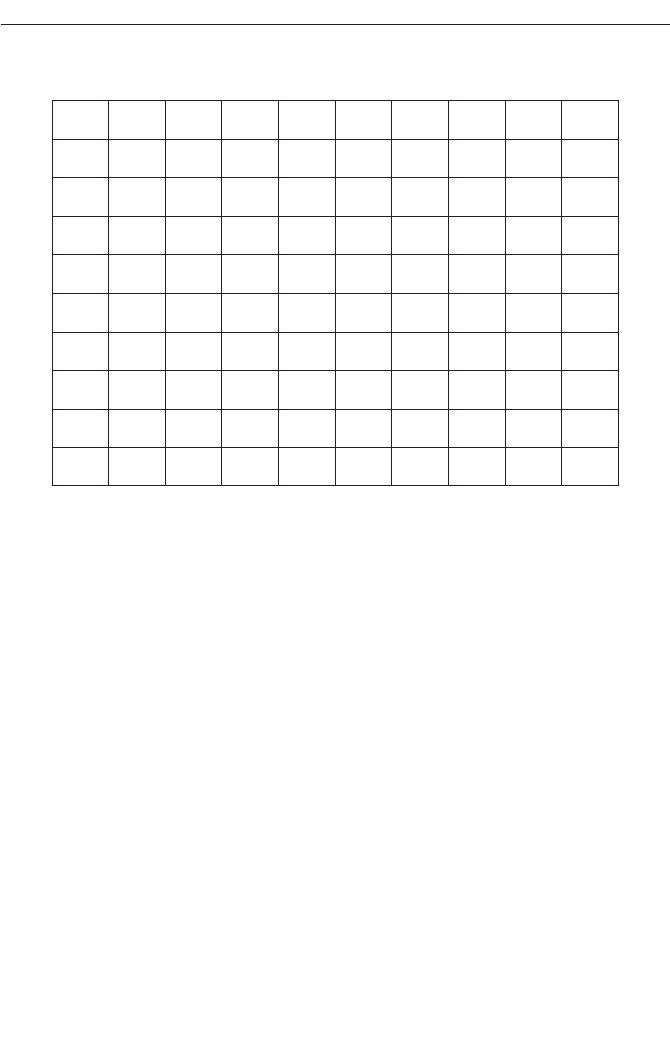
Tabla 3.1. Tiempos de ciclo del sistema manipulador.
9,3 9,8 9,1 8,9 9,4 10,7 8,7 11,4 10,4 9,7
8,7 9,8 9,6 13,0 9,6 10,5 9,5 8,5 11,9 10,1
9,7 11,0 9,7 10,3 10,0 10,2 9,5 9,1 10,1 11,5
10,5 8,9 12,2 9,7 9,7 8,5 12,0 10,0 9,6 10,4
9,5 8,3 10,9 9,1 9,8 8,9 12,9 9,7 10,7 9,7
10,4 7,6 9,7 9,5 8,4 10,4 8,7 8,5 8,0 11,2
7,4 10,0 11,3 8,3 8,0 9,3 10,0 10,1 10,5 8,9
9,3 7,1 10,5 10,1 8,3 8,6 11,5 10,3 10,8 11,0
10,0 9,5 9,0 9,2 10,1 10,0 10,8 8,5 10,6 11,6
10,7 9,7 9,6 9,9 10,0 10,0 11,0 9,5 9,8 9,7